Mini Segway Bot
A 3D-printed robot that balances on 2 wheels for 30 seconds
January 2019 - March 2019
Source:
Or, a 2D view of it for unsupported browsers:
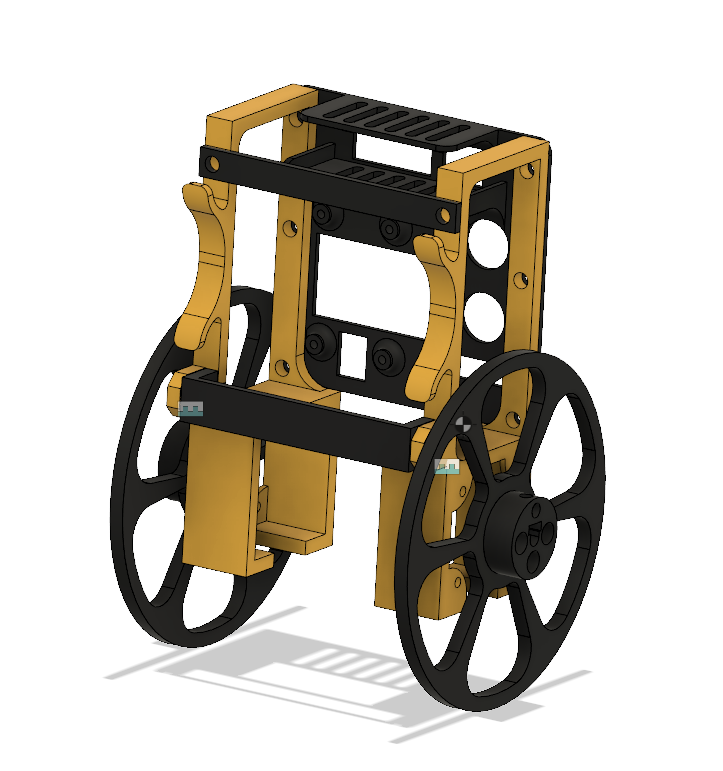
- Designed, programmed, manufactured, and assembled a robot that can balance itself for 30 seconds on a carpet floor.
- Fused data from accelerometer and gyroscope to determine robot tilt.
- Researched methods to filter data more accurately, including moving average and exponential smoothing, complementary filters and Kalman filters.